窄通道侧面堆垛式无人叉车设计方案
随着智能物流仓储行业的迅速发展,智能化立体仓储的解决方案也不断地向着高库容率、高存储效率、低成本方向更新升级。
智能化立体仓储解决方案,目前主要包括三大类。一是基于有轨堆块机的立体仓储,主要应用于长通道、高位货架的场景,存储效率高、场景适用性强,但成本偏高;二是基于穿梭车的立体仓储,主要应用于中低位货架,产品同质化较强的场景,成本低,但存储效率低、场景适用性较差;三是基于无人叉车的立体仓储口,主要应用于中低位货架、多通道场景,存储效率高,场景适用性强,成本适中。无人叉车作为一种智能车辆机器人,将叉车技术和AGV 技术充分融合,在智能化立体仓储领域占据越来越重要的市场,按叉车本体类型分为托盘堆垛式无人叉车、平衡重式无人叉车、插腿式无人叉车、前移式无人叉车、多向运行式无人叉车和侧面堆垛式无人叉车等。其中,对于无人叉车,市场上缺少同时兼顾堆垛通道窄、存储效率高、库容率高等优点的产品。
基于上述问题,本文提出一种窄通道侧面堆垛式无人叉车(以下简称无人叉车)设计方案。然后,对此类无人叉车的一个设计难点,即液压同步问题,从机械结构、液压系统两方面提出详细的设计方法。最后,通过3D软件对其进行模块化建模,并通过样机试验的方法验证设计的合理性,保证该产品同时兼顾堆垛通道窄、存储效率高、库容率高等优点。
1、设计关键参数
无人叉车设计的关键参数主要包括: 最大货物重量、最大货物形体尺寸、载荷中心距、最小堆垛通道宽度、最大举升高度、货叉未端最大挠度、最大行驶速度、满载最大提升速度。其中,最小堆垛通道宽度是指叉车在货架通道内能够堆垛作业时,对应的通道最小宽度。最大举升高度是指货叉水平段或升降平台上表面至地面之间最大的垂直距离;货叉末端最大挠度是指货叉在额定负载,最大行程时,货叉未端在竖直方向上产生的最大线位移。本文涉及无人叉车的关键参数如(表1)所示:
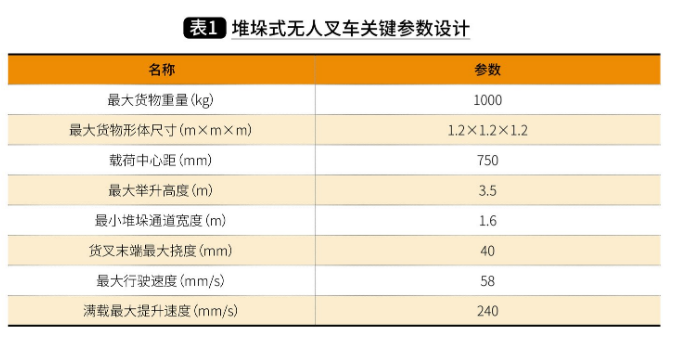
其中,为了有效减小堆垛通道宽度,经结构设计,最小堆垛通道宽度由传统的3米缩减至1.6米,大幅提升了终端仓储的库容率。
2、安全检测方案
智能化立体仓储的系统安全检测,是项目正常运转的先决条件,也是重点的设计对象。基于无人叉车的立体仓储,安全检测主要从车体本身、与车体对接的上料装置两方面考虑。针对上述问题,本节提出的安全检测方案如下:
上料装置:① 设计有托盘定位装置和货物尺寸超限传感器,当货物宽度超限、长度超限、高度超限时会发出报警信号;② 设计有货物超重传感器,当货物超重时发出报警信号;③ 设计有货物位置超差检测传感器和用来判断货物有无的传感器。
无人叉车:① 载货平台上,设计传感器安装框架,安装有货物尺寸超限传感器,当货物宽度超限、长度超限、高度超限时会发出报警信号;② 载货平台上设计有判断托盘有无和判断空托、满托的传感器;③ 液压系统中设计有压力检测传感器,当货物超重,或系统压力异常时,系统发出报警信号;④ 货架上货物有无的检测传感器,无人叉车进叉前,先通过传感器,检测货架上货物的有无,同时验证提升高度的正确性,以确保进叉安全;⑤ 无人叉车安装有陀螺仪,当底盘倾斜超差时,整车将发出报警信号,并禁止举升作业。
3、货物存取动作流
由于单次存放货物的动作流与单次取放货物的组成动作相同,动作流类似,本文以单次存放货物的动作流为研究对象并进行设计。上料区取料时,动作流程如【图1-(a)】所示,无人叉车根据WCS(Warehouse Control System) 仓储控制系统指令,通过直行、侧向移动、转弯等动作,移动至上料点。确认上料点安全检测传感器无异常后,将载货台提升至相应高度,同时无人叉车安全检测传感器对上料点货物进行安全检测。无异常后,伸叉取货。在货叉收回的过程中,无人叉车载货台的尺寸超差传感器,时时对货物的高和宽进行尺寸超差检测,一旦出现尺寸超差,无人叉车停机,系统报警。如货叉收回过程中无异常,货叉回到中位后,为降低无人叉车重心,保证运行的平稳安全性,同时兼顾货物存放效率,载货平台将回落至离地800mm处。
货架区存料时,动作流程如【图1-(b)】所示,无人叉车根据 WCS 仓储控制系统指令,通过直行、侧向移动、转弯等动作,移动至货架区对应点。首先通过陀螺仪检查地面平整情况,确保整车倾斜情况满足安全要求。然后将载货平台上移至相应库位高度光电检测传感器检测货架上货位为空货叉外伸至相应库位,下落平台,将货物存放于立体货架上。最后,货叉收回,载货平台回落到低位。存取物料动作流完成。

4、产品结构的总体设计
按照模块化理念对产品结构进行总体设计,主要从货物升降、货叉、车体底盘三方面考虑。
货物升降:为便于后期举升高度的拓展,降低整车中心高度,本无人叉车采用伸缩门架实现载货平台的升降。本方案支持货物提升高度 8 米以上。同时,由于货物重量较重,为保证高位时伸缩门架的刚性,本无人叉车设计有双伸缩门架。其中,升降高度通过拉绳编码器检测。
货叉:为提升货物存取效率,降低仓储通道宽度,本无人叉车设计有双向伸缩货叉,以侧向进叉的方式完成货物的取放。伸缩货叉上设计有中位检测传感器及行程限位传感器。
车体底盘:采用双舵轮动力轮加4个万向轮支撑的底盘结构,舵轮设计有浮动结构,底盘通过型材焊接而成,使整车可实现转弯、自旋、侧移功能。
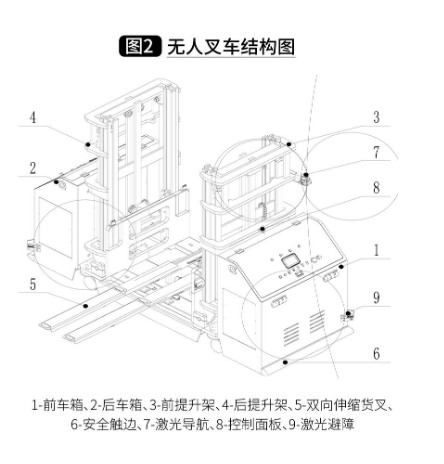
综上,无人叉车可详细划分为前车箱、后车箱、前提升架、后提升架、双向伸缩货叉、安全触边、激光导航、控制面板、激光避障、动力底盘、液压系统、供电系统、安全检测系统等,整车结构如(图2)所示。
上一篇:架式堆垛机的设计特点与分析
下一篇:冷库叉车使用注意事项
苏州苙泽物流设备有限公司
全国咨询电话:400-086-2500
备案号:苏ICP备18036910号